資訊內容
Scratch編程與物理-用Scratch學習“倒車雷達”
歡迎關注微信公眾號"吉米編程啟蒙"。
上一篇文章中,詳細介紹了超聲波的知識和應用,并用Scratch模擬了“超聲波測速”技術。文章見“Scratch編程與物理-用Scratch學習“超聲波測速””。
今天接著學習超聲波的另一個廣泛應用,“倒車雷達”。
一、倒車雷達的介紹
倒車雷達我們都知道是什么,倒車雷達在倒車時,利用超聲波原理,由裝置在車尾保險杠上的探頭發送超聲波撞擊障礙物后反射此聲波,計算出車體與障礙物間的實際距離,然后提示給司機,使停車或倒車更容易、更安全。
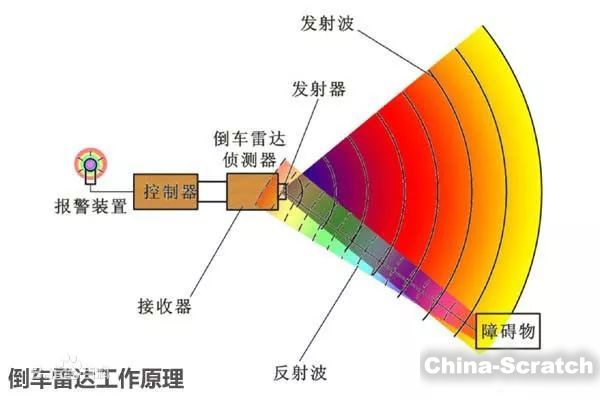
倒車雷達主要由超聲波傳感器、控制器和顯示器或蜂鳴器等組成。
1、超聲波傳感器:主要功能是發出和接收超聲波信號,然后將信號輸入到主機里面,通過顯示設備顯示出來。
2、控制器:對信號進行處理,計算出車體與障礙物之間的距離及方位。
3、顯示器或蜂鳴器:當傳感器探知汽車距離障礙物的距離達到危險距離時,系統會通過顯示器和蜂鳴器發出警報,提醒駕駛員。
二、“倒車雷達”的模擬實現
今天,我們打算用Scratch3.0和樂高wedo2.0一起實現一個“倒車雷達”,這個倒車雷達具備的功能有:
1、超聲波傳感器,檢測車與障礙物的距離。
2、倒車影像,在倒車時打開攝像頭,實時顯示周圍情況。
3、蜂鳴器,當車距離障礙物低于安全距離時,會發出報警的聲音,而且距離越近,報警越急促。
下面我們先看一下最終實現的效果。
三、“倒車雷達”的程序設計
那這個倒車雷達是怎么實現的呢?下面我們詳細介紹下主要的設計。
1、“超聲波傳感器”功能,是通過樂高wedo2.0來實現的。樂高wedo2.0自帶距離傳感器的器件。
2、蜂鳴器,主要是通過Scratch3.0的聲音功能模擬的。
當距離在(40,100)內的時候,顯示一般報警音,當距離在40內的時候,顯示強烈局促的報警音。

3、倒車影像,主要是用Scratch3.0的視頻功能實現的。
當收到“開始倒車”的消息時,開啟攝像頭。

當倒車結束時,關閉攝像頭。

以上就是倒車雷達的主要設計。
聲明:本文章由網友投稿作為教育分享用途,如有侵權原作者可通過郵件及時和我們聯系刪除



相關資訊
